| 1 |
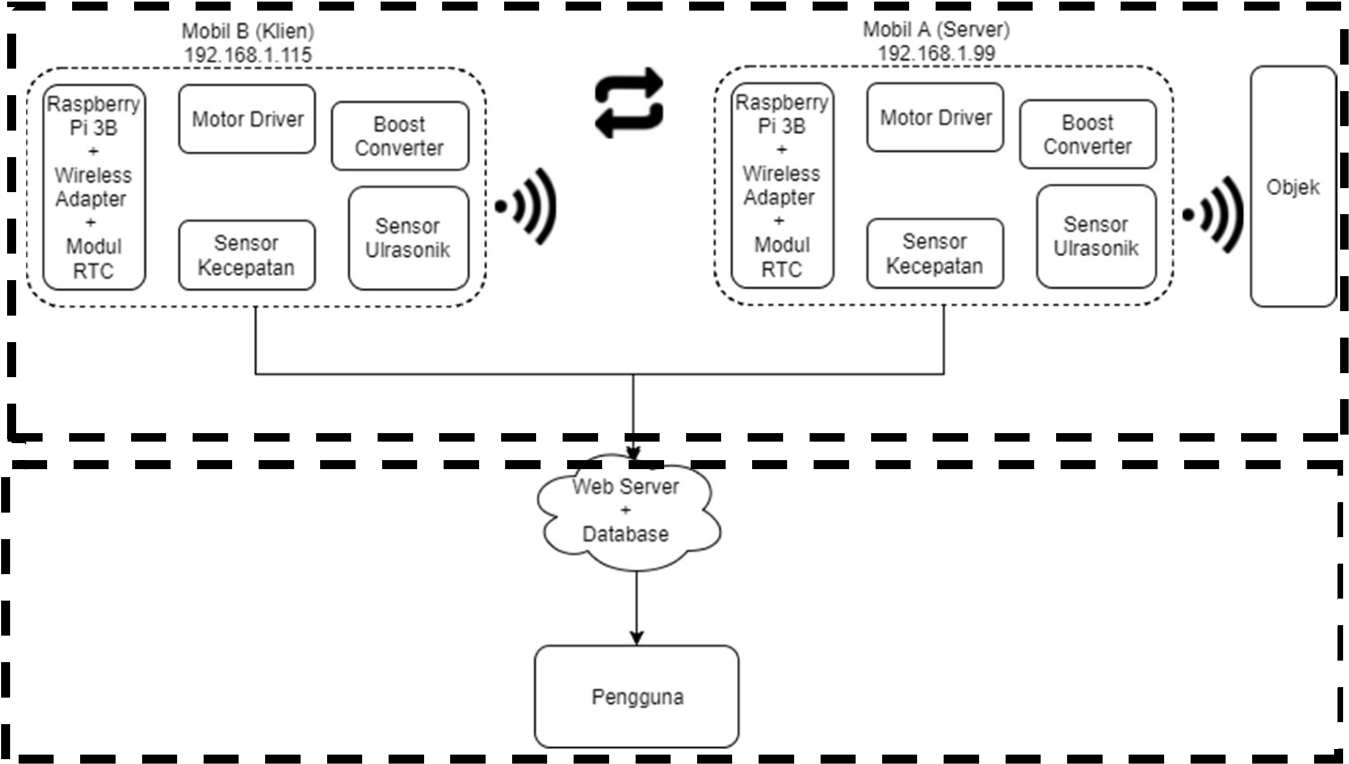
Raspberry Pi 3+ model B |
- ARMv8 (64/32-bit architecture)
- GHz 64-bit quad-core ARM Cortex A53
- 1 GB RAM
| Mikrokomputer/Pusat Pemprosesan Sistem |
| 2 |
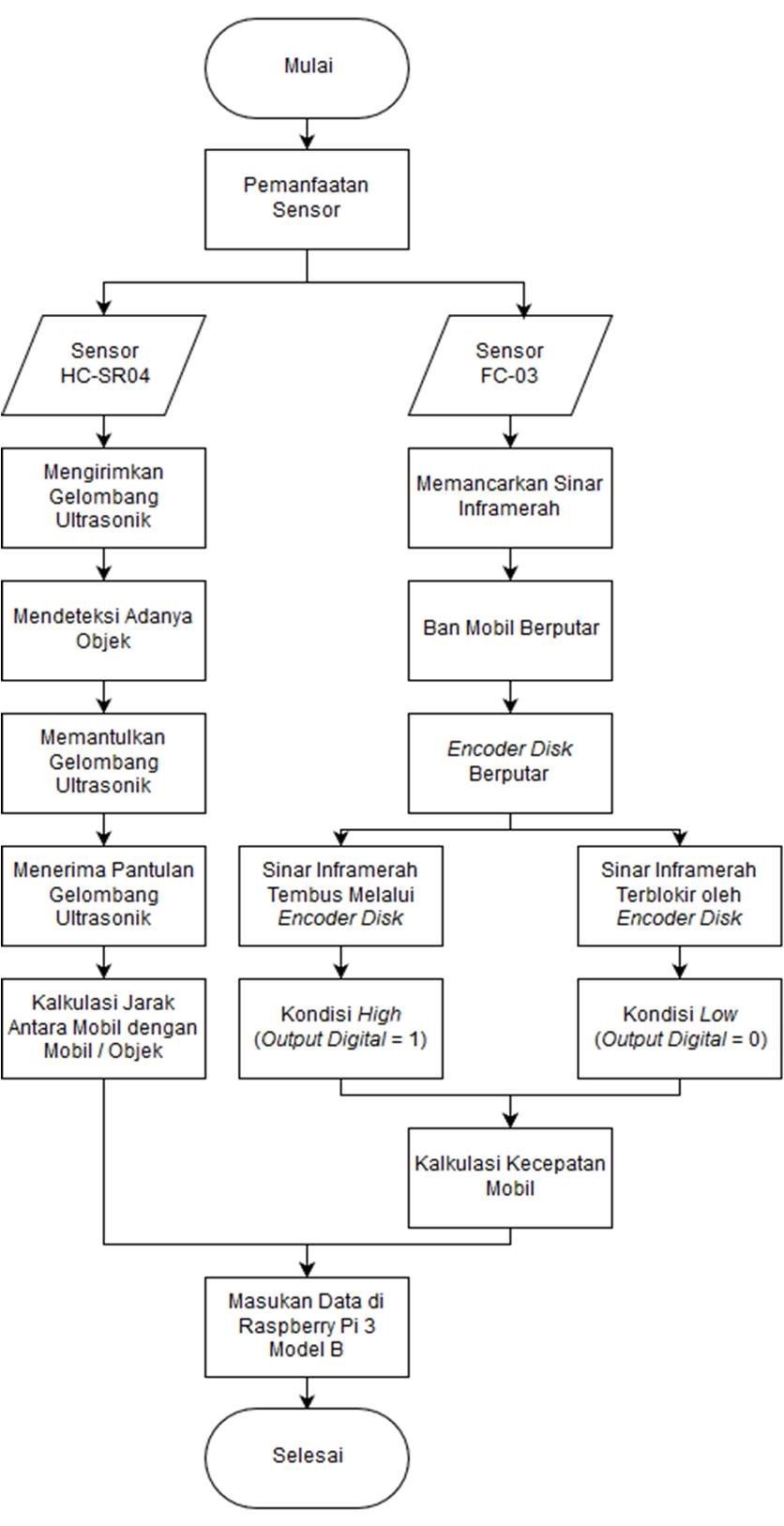
Sensor Ultrasonik HC-SR04 |
- Catu daya: +5V DC
- Arus statis: < 2mA
- Arus DC: 15mA
- Sudut efektif: < 15°
- Jarak jangkauan: 2-400cm
- Resolusi: 0,3 cm
|
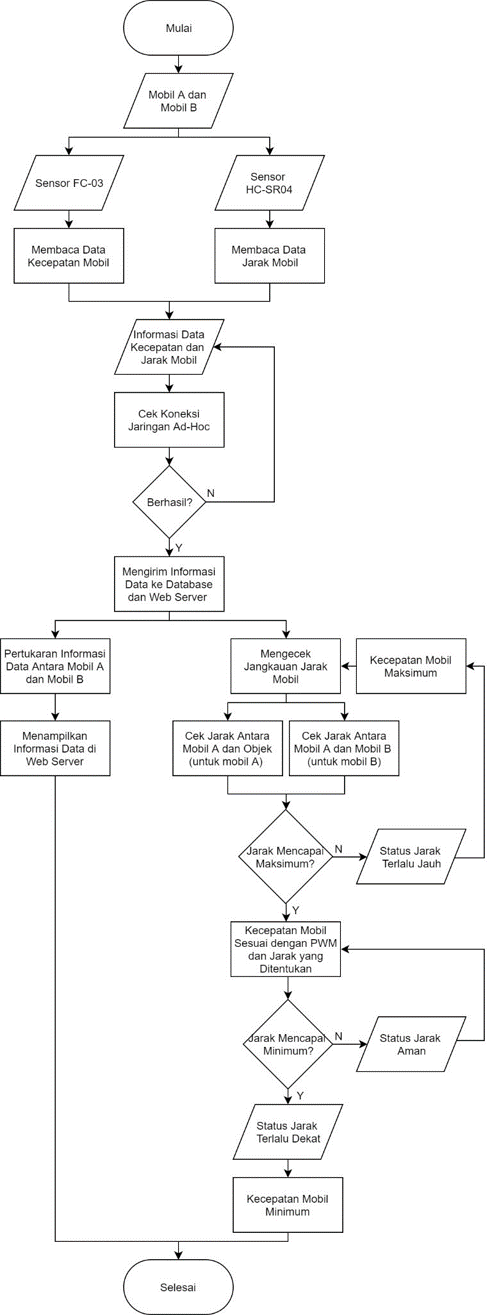
Menentukan jarak antara sensor dan mobil atau objek terdekat di jalurnya. |
| 3 |
Sensor Kecepatan FC-03 |
- Sudut pengukuran: 30° Trigger input pulse: 10 µs
- Dimensi: 45 mm x 20 mm x 15 mm
- Berat: ± 10 g
- Tegangan input: 3,3~5V
- Bentuk output: Digital output (0 dan 1)
- Dimensi: 3,8cm x 1,4cm x 0,7cm
- Berat: 3 g
- Lubang sekrup 3mm untuk pemasangan
|
Menentukan kecepatan mobil berdasarkan RPM |
| 4 |
Motor Driver L298N |
- Tegangan input: 3,2~60V DC
- Catu daya: 5–35V DC
- Arus maksimum: 2A
- Arus yang bekerja: 0~36mA
- Konsumsi daya maksimum: 20W
- Suhu penyimpanan: - 25°C ~ +130°C
|
pengubah kontrol PWM untuk menggerakkan motor DC |
| 5 |
Boost Converter MT3608 |
- Dimensi: 3,4cm x 4,3cm x 2,7cm
- Tegangan input: 2V hingga 24V
- Frekuensi tetap: 1,2MHz
- Pembatas arus internal: 4A
- Tegangan output dapat disesuaikan hingga batasan tegangan output maksimum 28V
- Efisiensi hingga 97%
|
Meningkatkan daya output |
| 6 |
Wireless Adapter TL-WN722N |
- Antarmuka USB 2.0
- WPS Button
- Dimensi: 93.5 x 26 x 11mm
- Tipe antena: Detachable Omni Directional (RP-SMA)
- Gain antena: 4dBi
- Standar nirkabel: IEEE 802.11n, 802.11g, 802.11b
- Frekuensi: 2,4-2,4835GHz
- Signal rate: Sampai dengan 150 Mbps, 54 Mbps, dan 11 Mbps untuk 802.11n, 802.11g, dan 802.11b
- Transmit power: < 20dBm
- Wireless mode: mode Ad-Hoc atau mode infrastruktur
|
Sebagai gerbang komunikasi antarmobil. |
| 7 |
Real-time clock DS3231 |
- Waktu real-time yang menghitung detik, menit, jam, tanggal, bulan, hari, dan tahun hingga 2100 tahun.
- Akurasi ±2 ppm dari suhu 0°C sampai +40°C
- Akurasi ±3.5 ppm dari suhu -40°C sampai +85°C
- Tegangan operasi: 3,3-5,55 V
- Ukuran: 38mm (panjang) * 22mm (lebar) * 14mm (tinggi)
- Berat: 8g
|
Sebagai penunjuk waktu lokal pada mobil jikalau sewaktu-waktu terjadi kecelakaan |
.jpg)
.jpg)